LQR based Thrust control of Quadcopter
LQR Control and Quadcopter
Description
Propose a Linear Quadratic Controller that departs from the cascading design approach, opting for a unified control method that provides direct inputs to the actuators. The controller is designed to stabilize the quadcopter in the presence of disturbances and to track a desired trajectory. The controller is implemented using ROS2 C++ and tested in a Gazebo simulation environment.
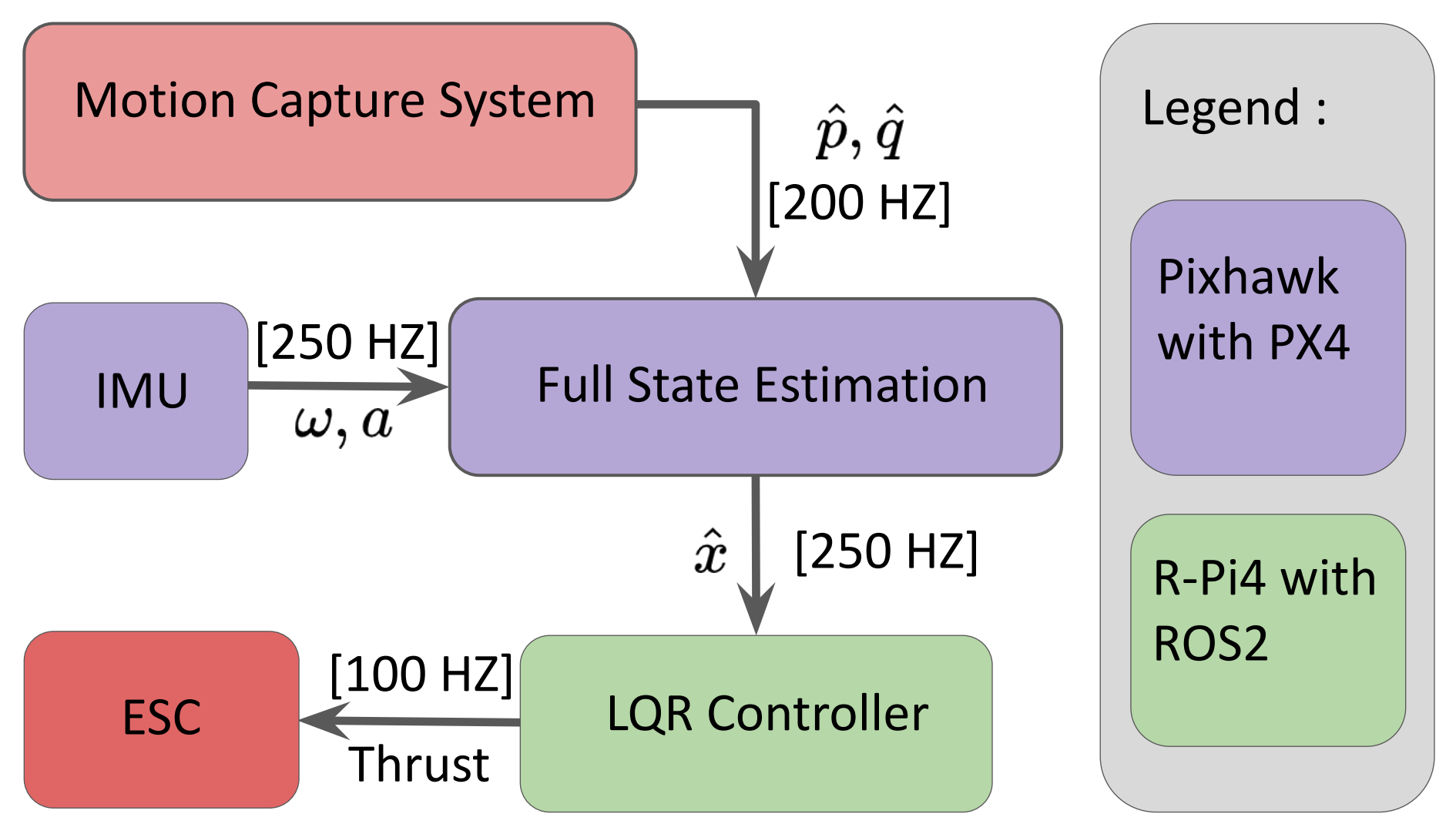
Control Architecture
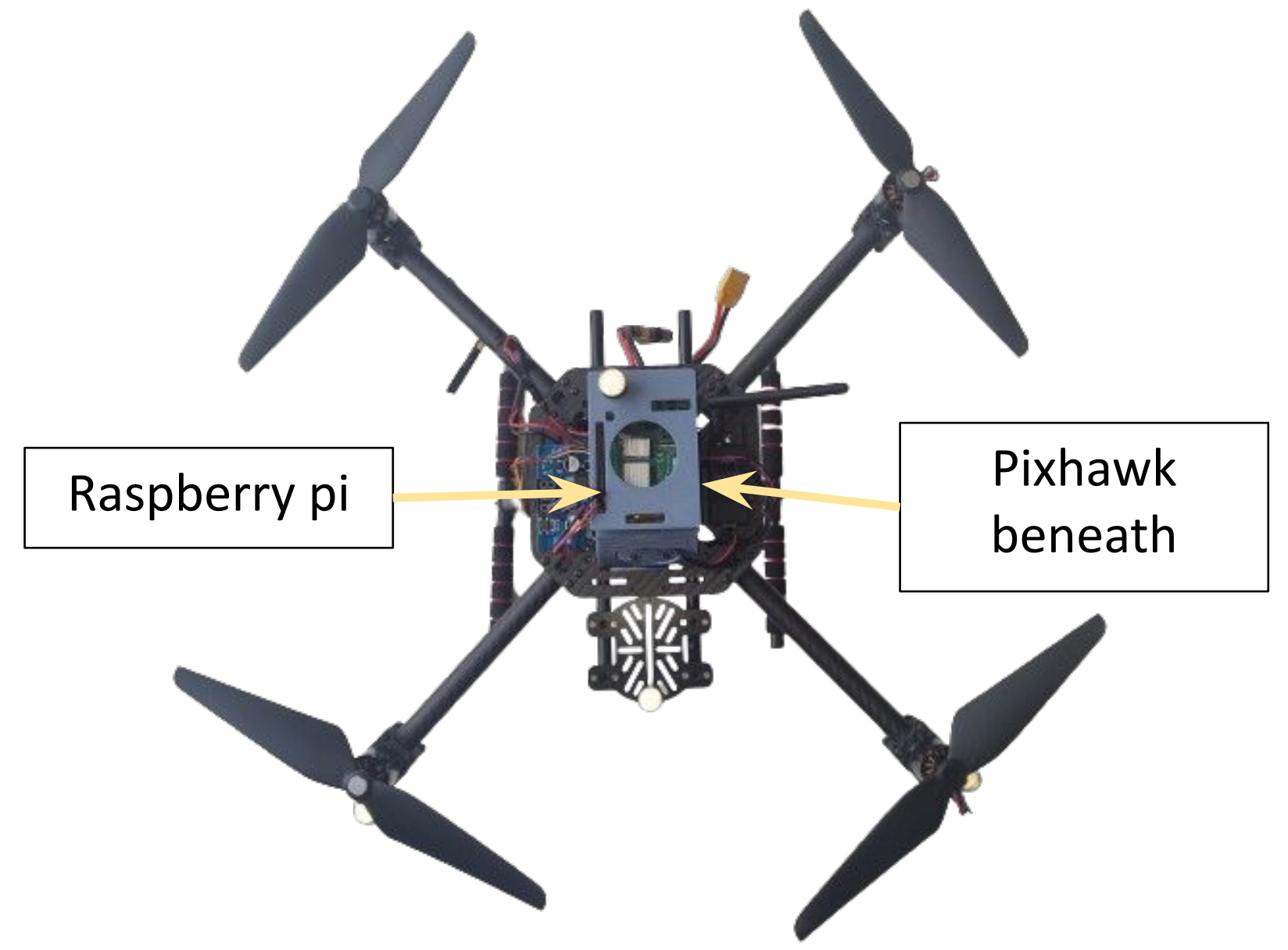
Hardware
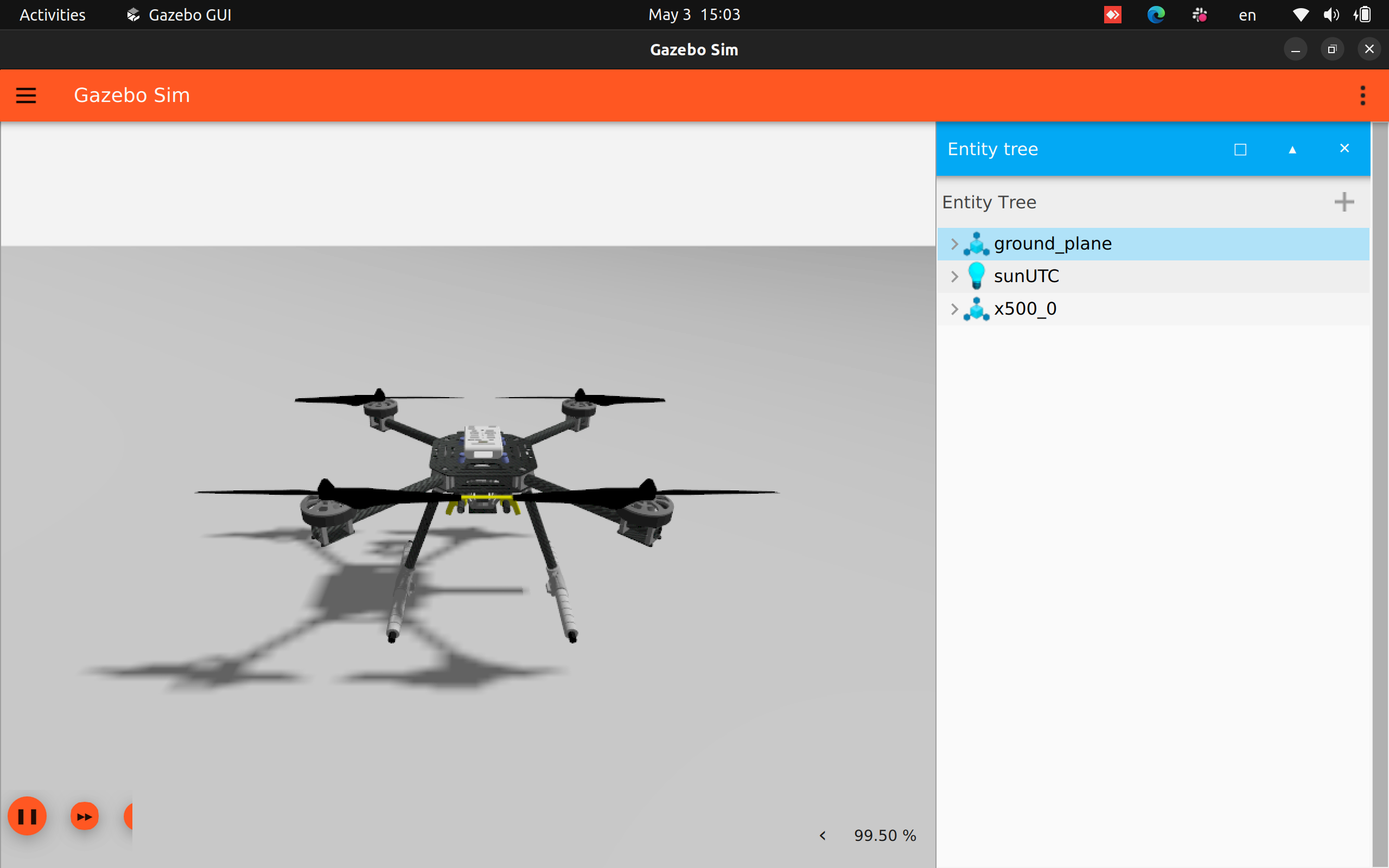
Simulation
References
Find the code GITHUB !!!